Master Thesis Defense
Inflection of Sign Language Manuals and Non-manuals of the body via Rigid Geometrical Transformations
- Press "space" to navigate forward (also can use arrow keys.)
- Press "t" to play 3D animations. Yes, it is 3D animation not just video.
- You can use your mouse to change the camera angle in 3D animation.
- You can use scroll wheel to zoom in and out in 3D animation.
- You can change the page zoom by pressing "ctrl" and "+" or "-" keys to adjust the presentation.
- Best viewed in Chrome or Chromium based browsers.
Master Thesis Defense
Inflection of Sign Language Manuals and Non-manuals of the body via Rigid Geometrical Transformations
23-11-2023
Primary Advisior: Dr. Fabrizio Nunnari [2]
Examiner: Dr. Patrick Gebhard [2]
Supervisor: Prof. Dr. Antonio Krüger [1][2]
[1] Saarland University, [2] DFKI, German Research Center for Artificial Intelligence, Cognitive Assistants, Affective Computing Group
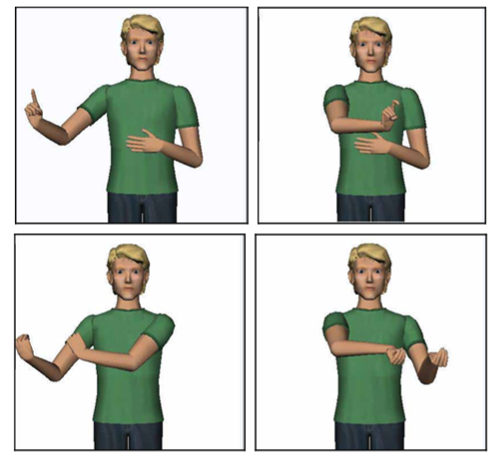
What is Sign Language?
"Inflection"
The person go home
The person go home
The person is going home
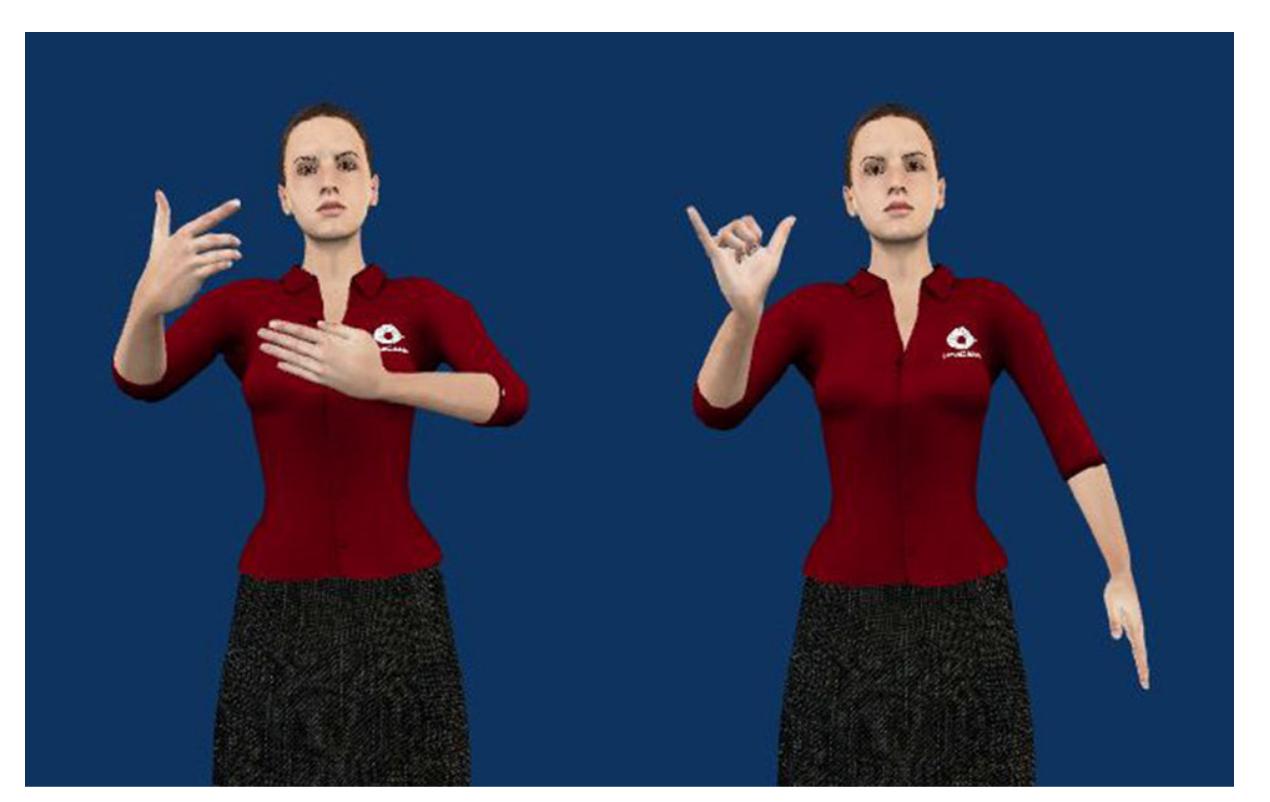
Inflection in Sign Language
(press "t" to play 3D animation)
A sign is being used in citation (dictionary) form. Now the same sign is used in inflected form Contextualized gloss: NICHT
Why are the current systems built like this?
(press "t" to play 3D animation)
(Heute bis auf Weiteres kein Zugverkehr) Non Inflected Sentence Original Sentence Motion capture data is hard to modify!
It is impossible to capture all combination of inflections
What is the State of the Art?
Manual/Procedural Animation Generation
Simax [1]
JASigning[2]
Current avatar animation system
End-to-End Deep Learning Based Animation Generation
End to end animation generation [1]
Progressive Transformers [2]
Motion Capture Based Approach
Animation generated using Motion Capture and Motion Elements [1] [2]
Vector Based Model
Animation using Vector Based Model [1][2]
Prosody Based Methods
Timing Inflection
Our contribution
Increment on the motion capture based System
Introduction to Inflection Parameters
Parameters of functions that transform animation data of a sign to contextulize it
Classification of the Inflections
Classification of the Inflections
Simplified Ideas
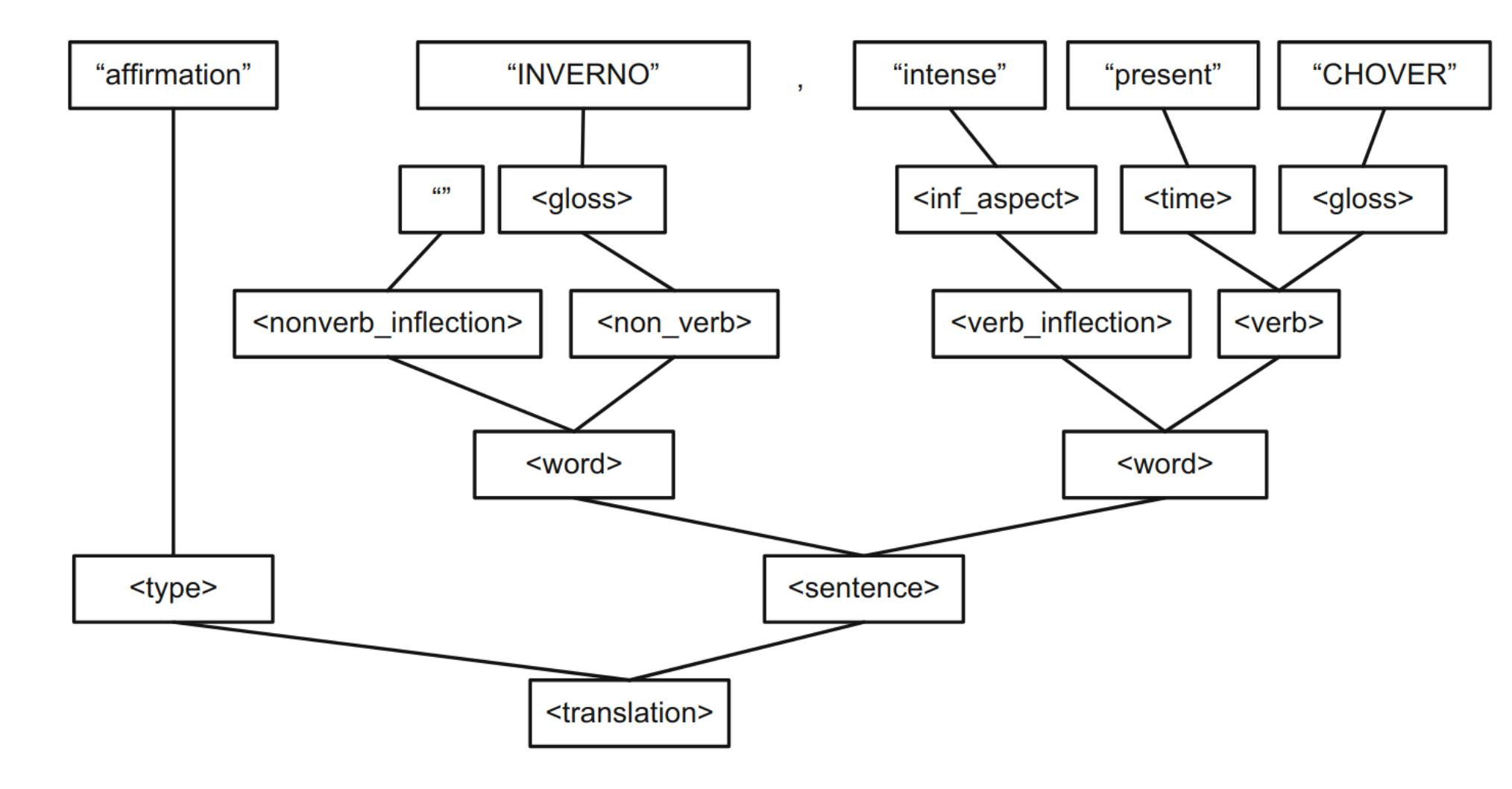
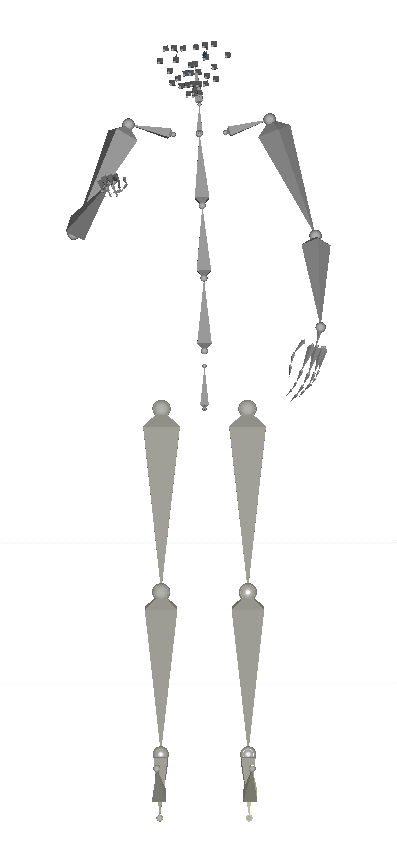
Input Data
Gloss: NICHT
Input data (Source)
Dictionary
Target Data (Target)
Sentence
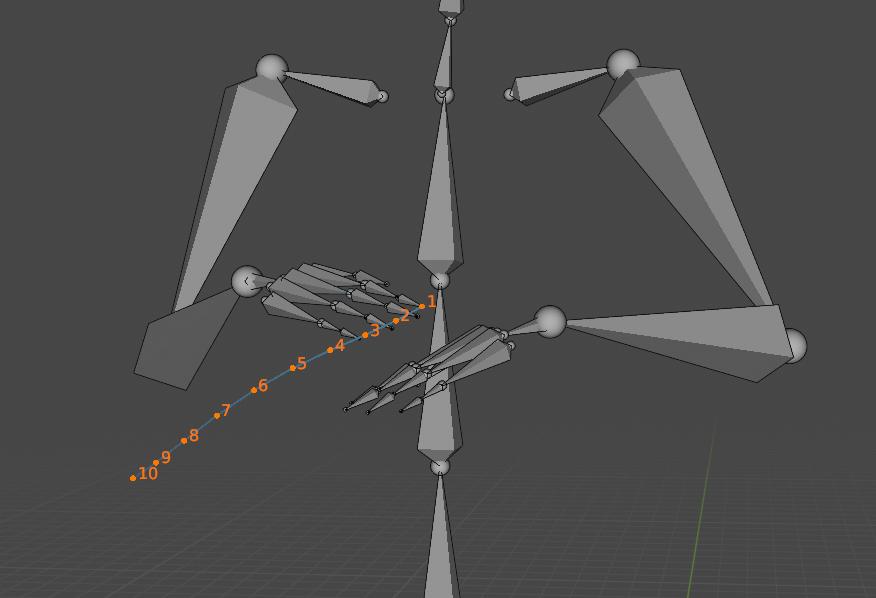
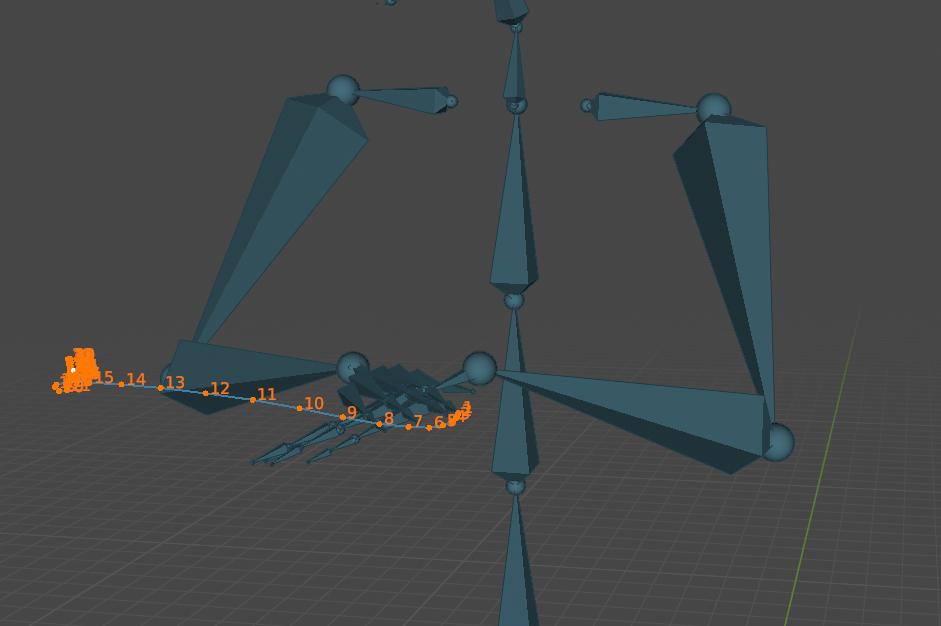
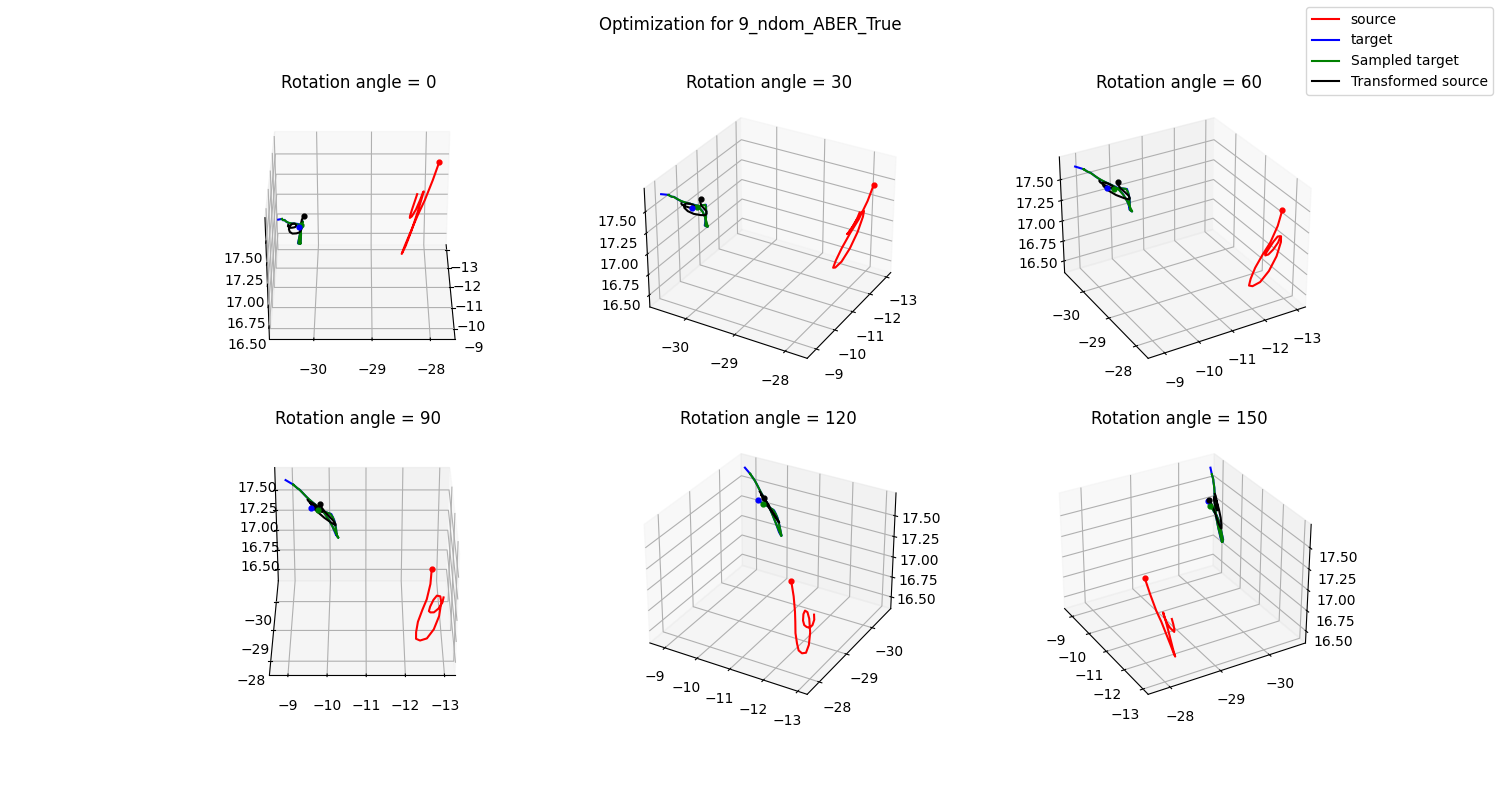
Trajectory Matching
Goal: Minimize the error
Error: L2-norm
Error: 0
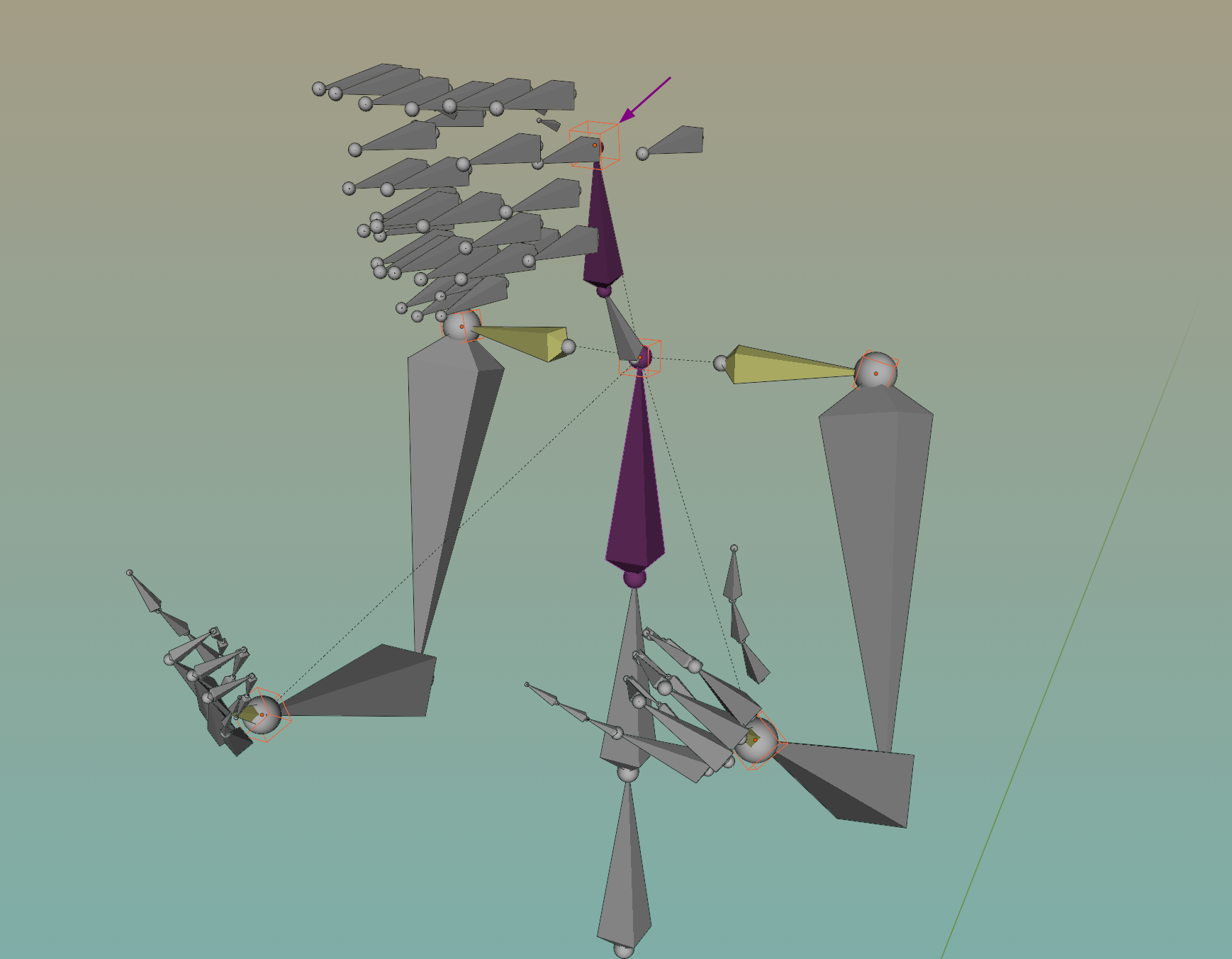
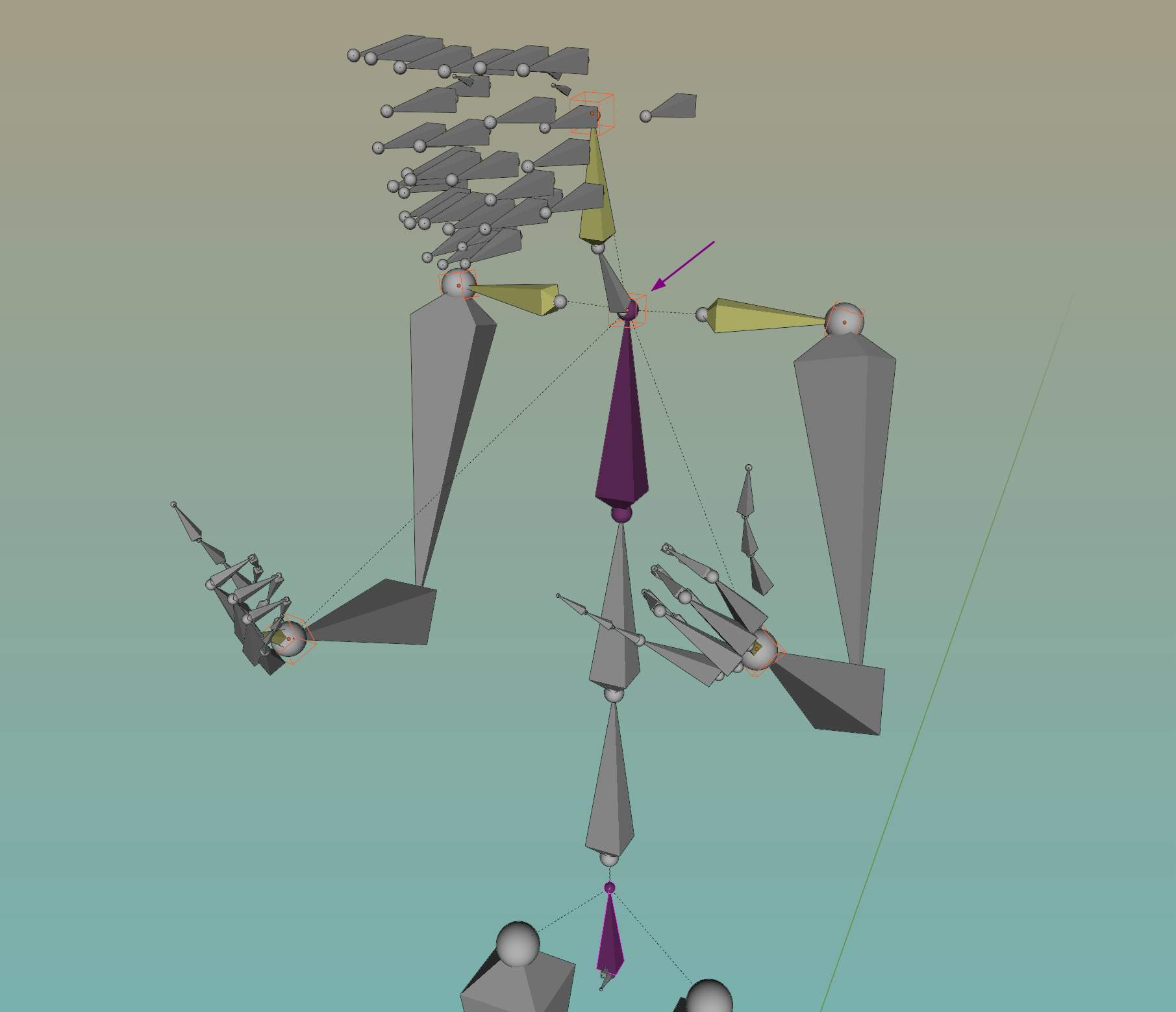
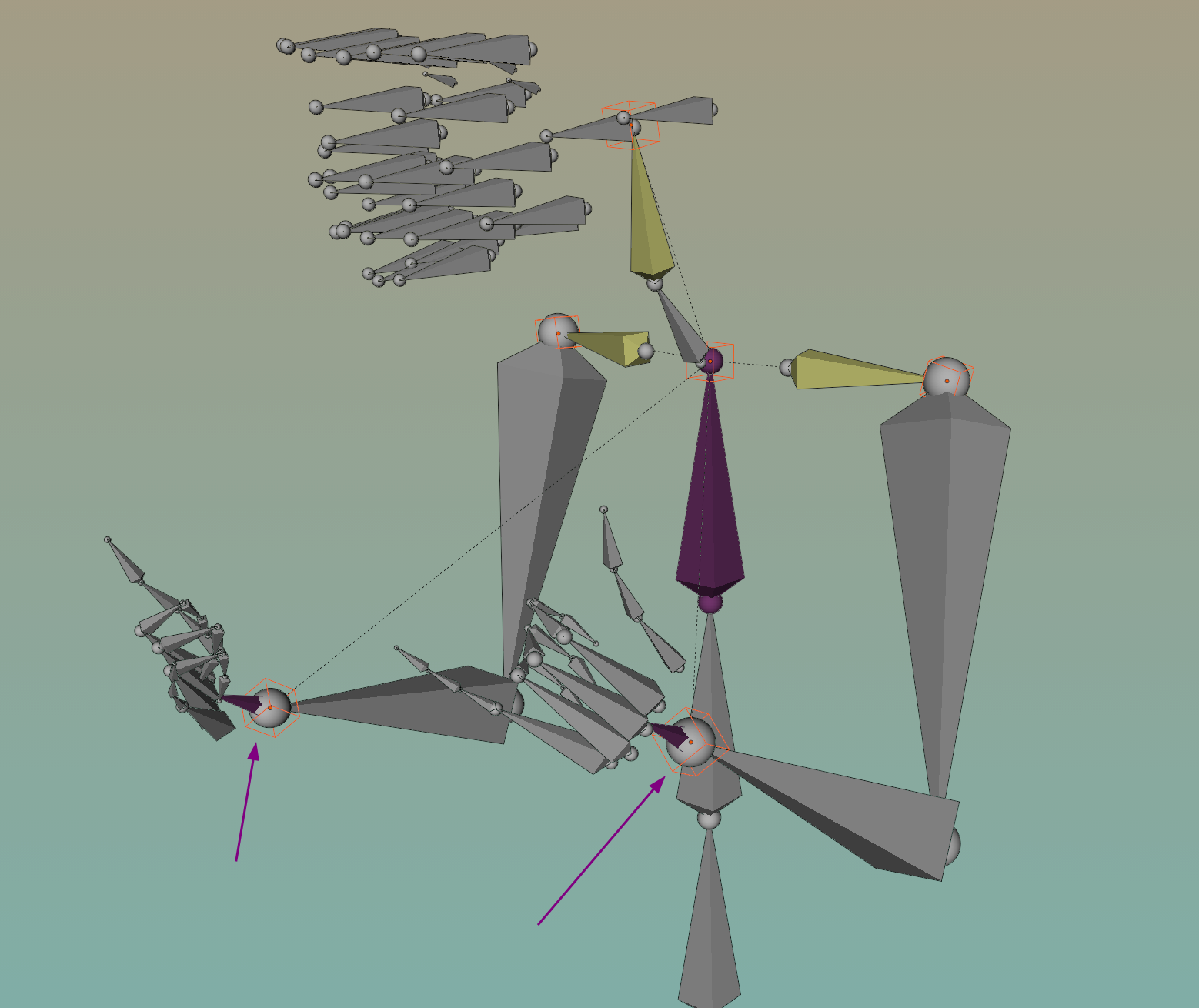
Computation of Average Orientation Delta
Computation of Average Translation Offset
Mathematical Formulation
Computation of Shoulder, Torso and Head Parameters
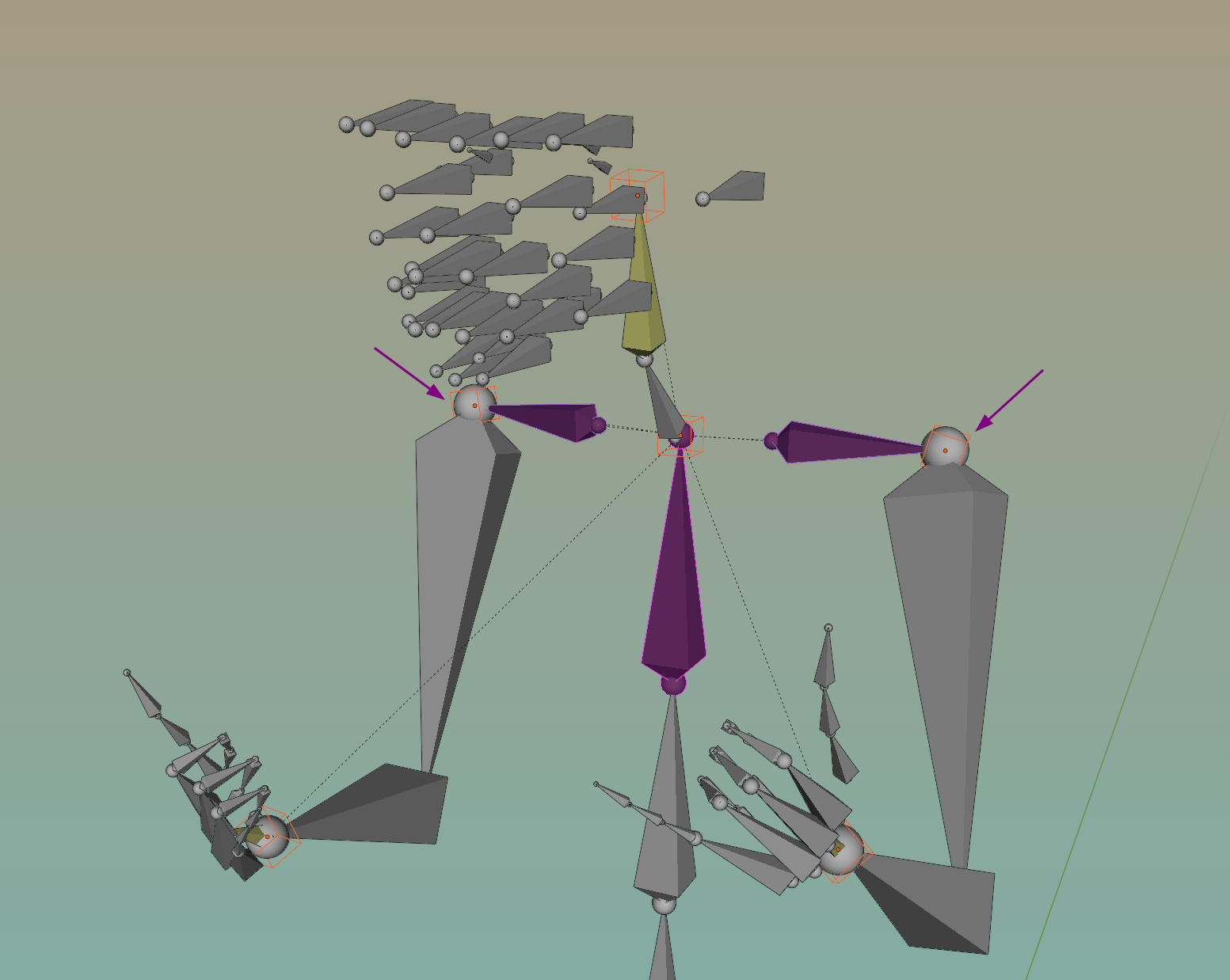
Shoulders
\[ \begin{aligned} \vec{\Delta}_{Sh} &= \frac{1}{N}\sum^{N} |\vec{X_{t}} - \vec{X_{s}}| \end{aligned} \]
Head
\[ \begin{aligned} \vec{\theta}_{He} &= \vec{R_{s}}^{-1}\vec{R_{t}}\\ \end{aligned} \]
Torso
\[ \begin{aligned} \vec{\Delta}_{T} &= \frac{1}{N}\sum^{N} |\vec{X_{t}} - \vec{X_{s}}| \end{aligned} \]
\[ \begin{aligned} \vec{\theta}_{T} &= \vec{R_{s}}^{-1}\vec{R_{t}}\\ \end{aligned} \]
Orientation
\[ \begin{aligned} \vec{\theta}_{Ha} &= \vec{R_{s}}^{-1}\vec{R_{t}}\\ \end{aligned} \]
Trajectory
\[ \begin{aligned} \text{Translation}, \vec{T} & = (t_{x}, t_{y}, t_{z})^{T}\\ \text{Rotation}, \vec{R} & = (\theta_{x}, \theta_{y},\theta_{z})^{T}\\ \text{Scale}, \vec{S} & = (s_{x}, s_{y}, s_{z})^{T} \end{aligned} \]
\[ \begin{aligned} \text{Error}, E = \arg\min_{\vec{T}, \vec{R}, \vec{S}} \left\| \vec{X}_{t} - \vec{X}_{s}^{'} \right\|_{2} \end{aligned} \]
Architecture: Online Sentence Generator












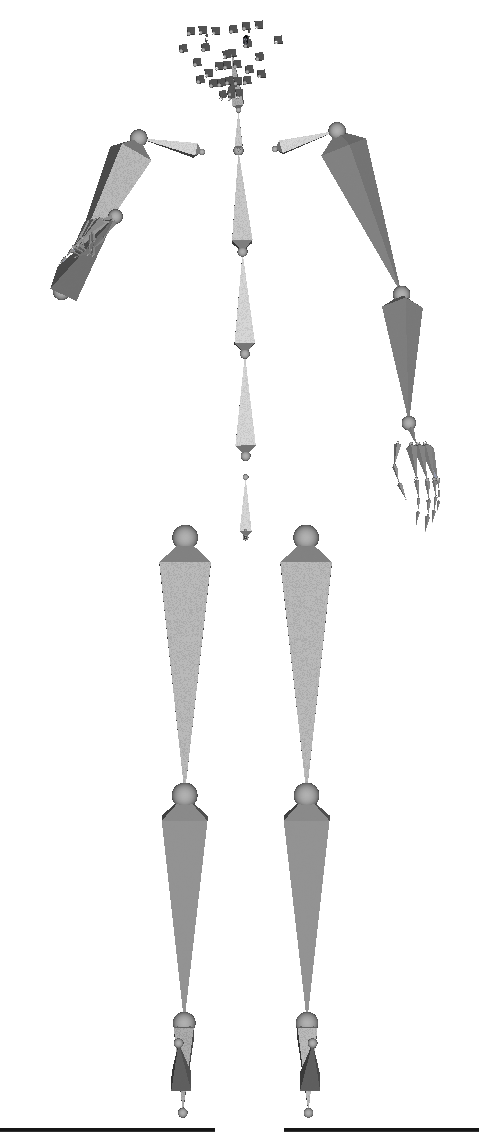



Animation Result
(press "t" to play 3D animation)
(Heute bis auf Weiteres kein Zugverkehr)
Non Inflected Sentence
Inflected Sentence
Original Sentence
Quantitative Results
Metric One: Mean Per Joint Position Error (MPJPE)
$$ \begin{aligned} E_{\text{MPJPE}} = \frac{1}{N} \sum_{i=1}^{N} \| p_{\text{pred}}(i) - p_{\text{gt}}(i) \|_2 \end{aligned} $$
Metric Two: Mean Per Joint Angular Error (MPJAE)
$$ \begin{aligned} E_{\text{MPJAE}} &= \frac{1}{3N} \sum_{i=1}^{3N} \left| m_{\text{pred}}(i) - m_{\text{gt}}(i) \mod \pm 180 \right| \end{aligned} $$
Metric Three: Normalized Power Spectrum Similarity (NPSS)
$$ \begin{aligned} NPSS &= \frac{\sum_{i} \sum_{j} p_{i, j}*\textrm{emd}_{i,j}}{\sum_{i} \sum_{j} p_{i, j}}\\ \end{aligned} $$
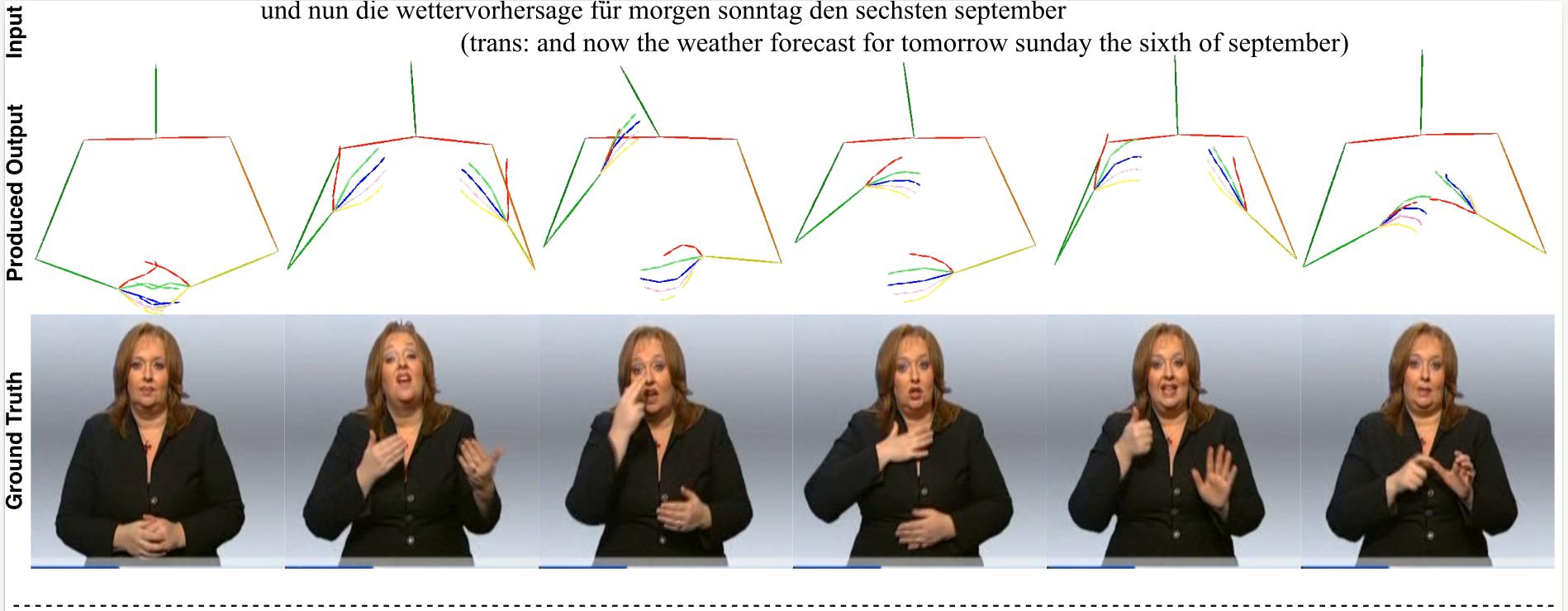
Qualitative Result
Preliminary User Study
Experts ($N = 6$) who are fluent in German Sign Language

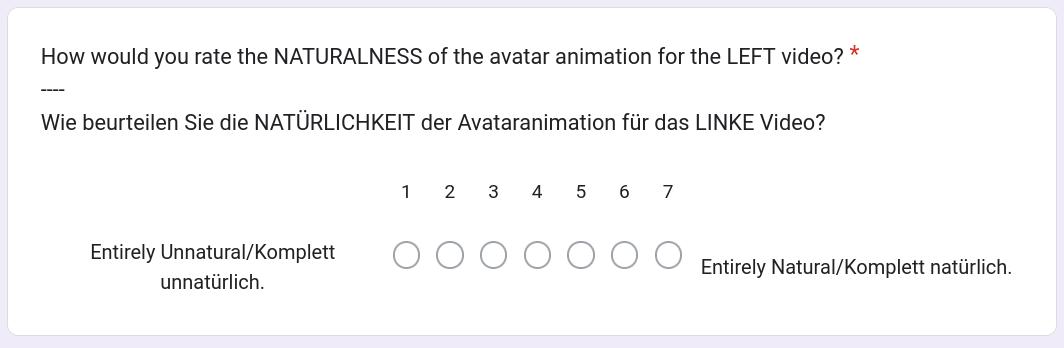
Naturalness
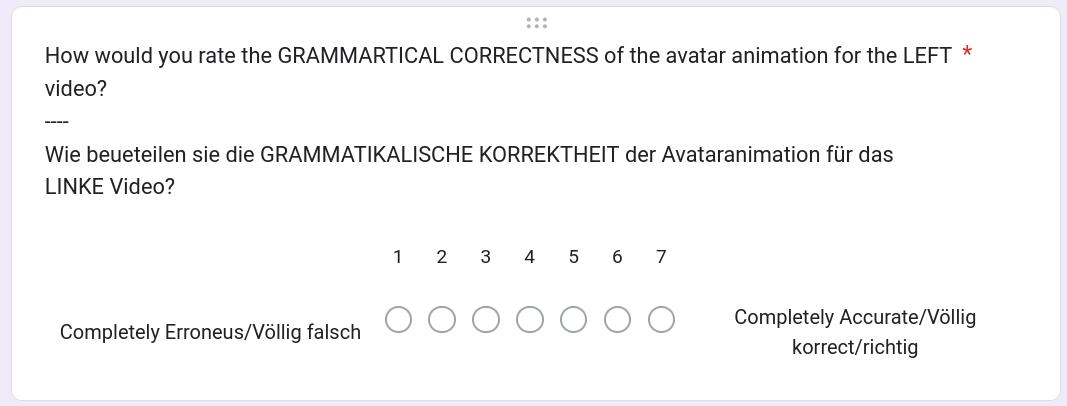
Grammatical Correctness
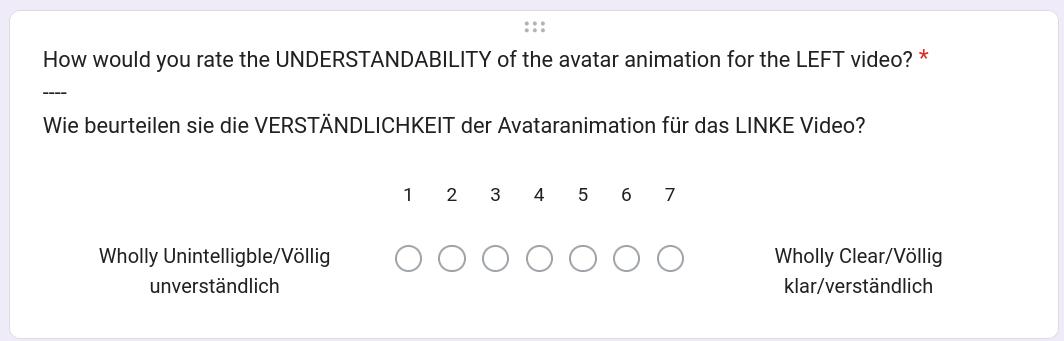
Understandability
User Study: Naturalness
User Study: Understandability
User Study: Grammatical Correctness
Key Observation
- No facial data
- Timing of playback
- Extreme torso movements

Limitations
Timing Issue
(press "t" to play 3D animation)
(Heute bis auf Weiteres kein Zugverkehr)
Glosses with Resampled Duration
Glosses with Original Duration
Complicated Trajectories
Self Collisons

Future Work
Trajectory Transitions